Publications
2026
Koopman Operators in Robot Learning
IEEE Transactions on Robotics
·
01 Jan 2026
·
doi:10.1109/TRO.2026.3654384
2025
Measure Preserving Flows for Ergodic Search in Convoluted Environments
Springer Proceedings in Advanced Robotics
·
02 Nov 2025
·
doi:10.1007/978-3-032-04584-3_38
3D Reprojection-Driven Robot Navigation Improves Depth Sensing
2025 International Conference on Advanced Robotics and Mechatronics (ICARM)
·
01 Aug 2025
·
doi:10.1109/icarm65671.2025.11293600
Multi-Agent Ergodic Exploration Under Smoke-Based Time-Varying Sensor Visibility Constraints
2025 IEEE International Conference on Robotics and Automation (ICRA)
·
19 May 2025
·
doi:10.1109/icra55743.2025.11128670
Ergodic Trajectory Optimization on Generalized Domains Using Maximum Mean Discrepancy
2025 IEEE International Conference on Robotics and Automation (ICRA)
·
19 May 2025
·
doi:10.1109/icra55743.2025.11127573
Ergodic Exploration over Meshable Surfaces
2025 IEEE International Conference on Robotics and Automation (ICRA)
·
19 May 2025
·
doi:10.1109/icra55743.2025.11127626
Multi-Agent Ergodic Exploration under Smoke-Based, Time-Varying Sensor Visibility Constraints
arXiv
·
01 Jan 2025
·
doi:10.48550/arxiv.2503.04998
Ergodic Exploration over Meshable Surfaces
arXiv
·
01 Jan 2025
·
doi:10.48550/arxiv.2503.05026
2024
Time-optimal ergodic search: Multiscale coverage in minimum time
The International Journal of Robotics Research
·
08 Oct 2024
·
doi:10.1177/02783649241273597
RB5 Low-Cost Explorer: Implementing Autonomous Long-Term Exploration on Low-Cost Robotic Hardware
2024 IEEE International Conference on Robotics and Automation (ICRA)
·
13 May 2024
·
doi:10.1109/icra57147.2024.10610399
Energy-Aware Ergodic Search: Continuous Exploration for Multi-Agent Systems with Battery Constraints
2024 IEEE International Conference on Robotics and Automation (ICRA)
·
13 May 2024
·
doi:10.1109/icra57147.2024.10609871
Scale-Invariant Specifications for Human–Swarm Systems
IEEE Transactions on Field Robotics
·
01 Jan 2024
·
doi:10.55417/fr.2023011
Sparse Sensing in Ergodic Optimization
Springer Proceedings in Advanced Robotics
·
01 Jan 2024
·
doi:10.1007/978-3-031-51497-5_9
Scale-Invariant Specifications for Human–Swarm Systems
IEEE Transactions on Field Robotics
·
01 Jan 2024
·
doi:10.1109/TFR.2024.3494721
RB5 Low-Cost Explorer: Implementing Autonomous Long-Term Exploration on Low-Cost Robotic Hardware
arXiv
·
01 Jan 2024
·
doi:10.48550/arxiv.2402.08897
Koopman Operators in Robot Learning
arXiv
·
01 Jan 2024
·
doi:10.48550/arxiv.2408.04200
Measure Preserving Flows for Ergodic Search in Convoluted Environments
arXiv
·
01 Jan 2024
·
doi:10.48550/arxiv.2409.09164
Ergodic Trajectory Optimization on Generalized Domains Using Maximum Mean Discrepancy
arXiv
·
01 Jan 2024
·
doi:10.48550/arxiv.2410.10599
2023
A Pareto-Optimal Local Optimization Framework for Multiobjective Ergodic Search
IEEE Transactions on Robotics
·
01 Oct 2023
·
doi:10.1109/TRO.2023.3284358
A Pareto-Optimal Local Optimization Framework for Multiobjective Ergodic Search
IEEE Transactions on Robotics
·
01 Oct 2023
·
doi:10.1109/tro.2023.3284358
Multi-Agent Multi-Objective Ergodic Search Using Branch and Bound
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
·
01 Oct 2023
·
doi:10.1109/iros55552.2023.10341353
Bi-Level Image-Guided Ergodic Exploration with Applications to Planetary Rovers
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
·
01 Oct 2023
·
doi:10.1109/iros55552.2023.10341437
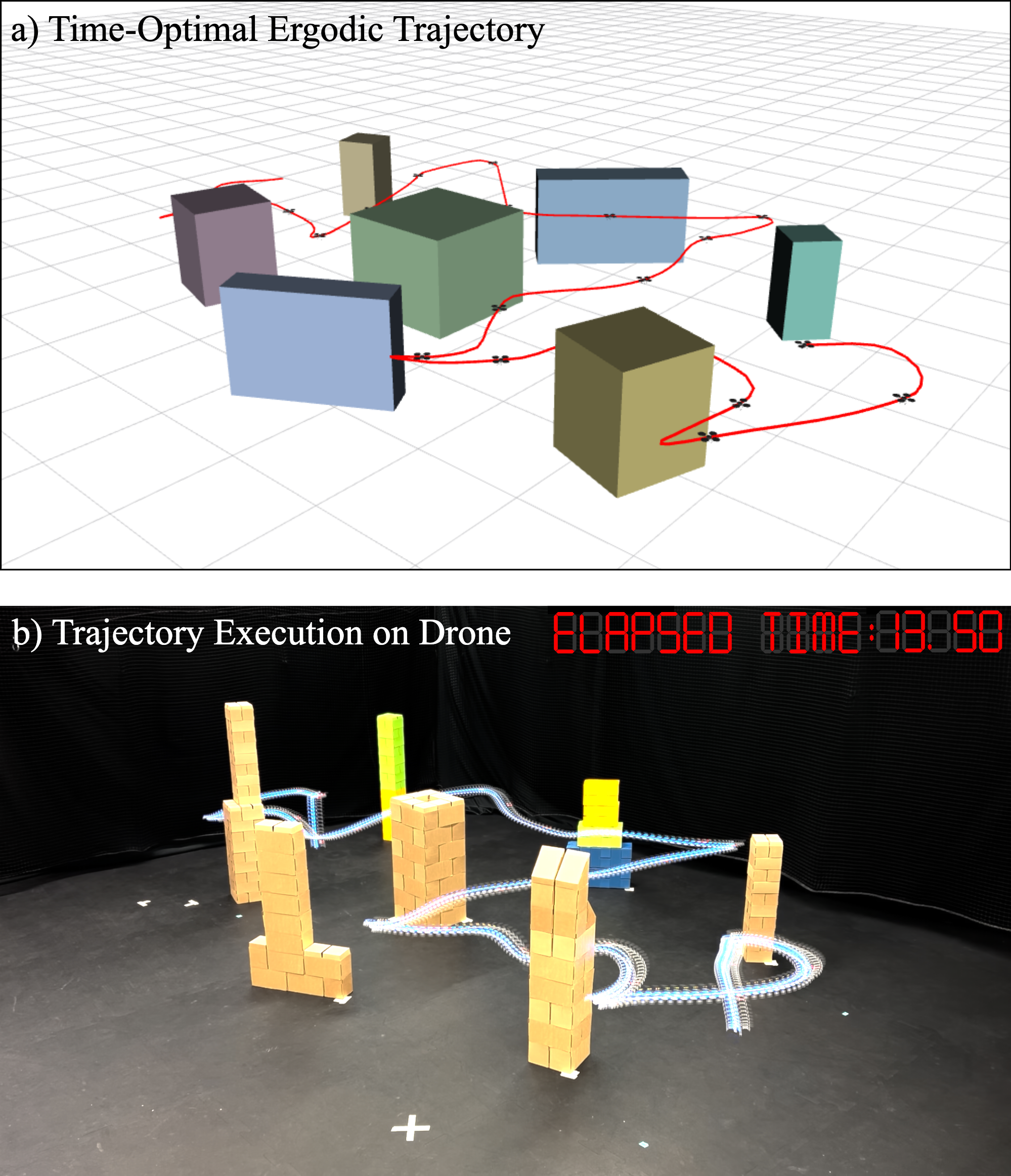
Time Optimal Ergodic Search
Robotics: Science and Systems XIX
·
13 Jul 2023
·
doi:10.15607/RSS.2023.XIX.082
In this paper, we investigate solutions to the time-optimal ergodic search problem for fast and adaptive robotic search and exploration.
Learning Stable Models for Prediction and Control
IEEE Transactions on Robotics
·
01 Jun 2023
·
doi:10.1109/TRO.2022.3228130
Learning Stable Models for Prediction and Control
IEEE Transactions on Robotics
·
01 Jun 2023
·
doi:10.1109/tro.2022.3228130
Safety-Critical Ergodic Exploration in Cluttered Environments via Control Barrier Functions
2023 IEEE International Conference on Robotics and Automation (ICRA)
·
29 May 2023
·
doi:10.1109/icra48891.2023.10161032
Scale-Invariant Fast Functional Registration
Springer Proceedings in Advanced Robotics
·
01 Jan 2023
·
doi:10.1007/978-3-031-25555-7_11
Bi-Level Image-Guided Ergodic Exploration with Applications to Planetary Rovers
arXiv
·
01 Jan 2023
·
doi:10.48550/arxiv.2307.16707
DEUX: Active Exploration for Learning Unsupervised Depth Perception
arXiv
·
01 Jan 2023
·
doi:10.48550/arxiv.2310.06164
Energy-Aware Ergodic Search: Continuous Exploration for Multi-Agent Systems with Battery Constraints
arXiv
·
01 Jan 2023
·
doi:10.48550/arxiv.2310.09470
2022
A Local Optimization Framework for Multi-Objective Ergodic Search
Robotics: Science and Systems XVIII
·
27 Jun 2022
·
doi:10.15607/rss.2022.xviii.052
Hybrid control for combining model-based and model-free reinforcement learning
The International Journal of Robotics Research
·
02 Jun 2022
·
doi:10.1177/02783649221083331
Multi-Agent Dynamic Ergodic Search with Low-Information Sensors
2022 International Conference on Robotics and Automation (ICRA)
·
23 May 2022
·
doi:10.1109/icra46639.2022.9812037
Learning Cooperative Multi-Agent Policies With Partial Reward Decoupling
IEEE Robotics and Automation Letters
·
01 Apr 2022
·
doi:10.1109/lra.2021.3135930
A Local Optimization Framework for Multi-Objective Ergodic Search
arXiv
·
01 Jan 2022
·
doi:10.48550/arxiv.2207.02923
Scale-Invariant Fast Functional Registration
arXiv
·
01 Jan 2022
·
doi:10.48550/arxiv.2209.12763
Scale-Invariant Specifications for Human-Swarm Systems
arXiv
·
01 Jan 2022
·
doi:10.48550/arxiv.2212.03106
2021
Linear Policies are Sufficient to Enable Low-Cost Quadrupedal Robots to Traverse Rough Terrain
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
·
27 Sep 2021
·
doi:10.1109/iros51168.2021.9636011
An Ergodic Measure for Active Learning From Equilibrium
IEEE Transactions on Automation Science and Engineering
·
01 Jul 2021
·
doi:10.1109/tase.2020.3043636
A dynamical model for generating synthetic data to quantify active tactile sensing behavior in the rat
Proceedings of the National Academy of Sciences
·
01 Jul 2021
·
doi:10.1073/pnas.2011905118
Hybrid Control for Learning Motor Skills
Springer Proceedings in Advanced Robotics
·
01 Jan 2021
·
doi:10.1007/978-3-030-66723-8_27
Learning Cooperative Multi-Agent Policies with Partial Reward Decoupling
arXiv
·
01 Jan 2021
·
doi:10.48550/arxiv.2112.12740
2020
Ergodic Specifications for Flexible Swarm Control: From User Commands to Persistent Adaptation
Robotics: Science and Systems XVI
·
12 Jul 2020
·
doi:10.15607/rss.2020.xvi.067
Data-driven Koopman operators for model-based shared control of human–machine systems
The International Journal of Robotics Research
·
10 Jun 2020
·
doi:10.1177/0278364920921935
Model-Based Generalization Under Parameter Uncertainty Using Path Integral Control
IEEE Robotics and Automation Letters
·
01 Apr 2020
·
doi:10.1109/lra.2020.2972836
Experimental Applications of the Koopman Operator in Active Learning for Control
Lecture Notes in Control and Information Sciences
·
01 Jan 2020
·
doi:10.1007/978-3-030-35713-9_16
Active Area Coverage from Equilibrium
Springer Proceedings in Advanced Robotics
·
01 Jan 2020
·
doi:10.1007/978-3-030-44051-0_17
Learning Stable Models for Prediction and Control
arXiv
·
01 Jan 2020
·
doi:10.48550/arxiv.2005.04291
Model-Based Generalization Under Parameter Uncertainty Using Path Integral Control
arXiv
·
01 Jan 2020
·
doi:10.48550/arxiv.2006.03106
Hybrid Control for Learning Motor Skills
arXiv
·
01 Jan 2020
·
doi:10.48550/arxiv.2006.03636
An Ergodic Measure for Active Learning From Equilibrium
arXiv
·
01 Jan 2020
·
doi:10.48550/arxiv.2006.03552
Ergodic Specifications for Flexible Swarm Control: From User Commands to Persistent Adaptation
arXiv
·
01 Jan 2020
·
doi:10.48550/arxiv.2006.06081
Data-driven Koopman Operators for Model-based Shared Control of Human-Machine Systems
arXiv
·
01 Jan 2020
·
doi:10.48550/arxiv.2006.07210
Dynamics and Domain Randomized Gait Modulation with Bezier Curves for Sim-to-Real Legged Locomotion
arXiv
·
01 Jan 2020
·
doi:10.48550/arxiv.2010.12070
2019
WHISKiT Physics: A three-dimensional mechanical model of the rat vibrissal array
openRxiv
·
03 Dec 2019
·
doi:10.1101/862839
Active Learning of Dynamics for Data-Driven Control Using Koopman Operators
IEEE Transactions on Robotics
·
01 Oct 2019
·
doi:10.1109/tro.2019.2923880
Active Area Coverage from Equilibrium
arXiv
·
01 Jan 2019
·
doi:10.48550/arxiv.1902.03320
Active Learning of Dynamics for Data-Driven Control Using Koopman Operators
arXiv
·
01 Jan 2019
·
doi:10.48550/arxiv.1906.05194
2018
Decentralized Ergodic Control: Distribution-Driven Sensing and Exploration for Multiagent Systems
IEEE Robotics and Automation Letters
·
01 Oct 2018
·
doi:10.1109/lra.2018.2849588
Data-Driven Measurement Models for Active Localization in Sparse Environments
Robotics: Science and Systems XIV
·
26 Jun 2018
·
doi:10.15607/rss.2018.xiv.045
Real-Time Area Coverage and Target Localization Using Receding-Horizon Ergodic Exploration
IEEE Transactions on Robotics
·
01 Feb 2018
·
doi:10.1109/tro.2017.2766265
Data-Driven Measurement Models for Active Localization in Sparse Environments
arXiv
·
01 Jan 2018
·
doi:10.48550/arxiv.1806.00112
Decentralized Ergodic Control: Distribution-Driven Sensing and Exploration for Multi-Agent Systems
arXiv
·
01 Jan 2018
·
doi:10.48550/arxiv.1806.05220
Structured Neural Network Dynamics for Model-based Control
arXiv
·
01 Jan 2018
·
doi:10.48550/arxiv.1808.01184
2017
Model-Based Control Using Koopman Operators
Robotics: Science and Systems XIII
·
12 Jul 2017
·
doi:10.15607/rss.2017.xiii.052
Ergodic Exploration Using Binary Sensing for Nonparametric Shape Estimation
IEEE Robotics and Automation Letters
·
01 Apr 2017
·
doi:10.1109/lra.2017.2654542
Real-Time Area Coverage and Target Localization using Receding-Horizon Ergodic Exploration
arXiv
·
01 Jan 2017
·
doi:10.48550/arxiv.1708.08416
Model-Based Control Using Koopman Operators
arXiv
·
01 Jan 2017
·
doi:10.48550/arxiv.1709.01568
Ergodic Exploration using Binary Sensing for Non-Parametric Shape Estimation
arXiv
·
01 Jan 2017
·
doi:10.48550/arxiv.1709.01560
2015
Model predictive control of buoyancy propelled autonomous underwater glider
2015 American Control Conference (ACC)
·
01 Jul 2015
·
doi:10.1109/acc.2015.7170893
A Nonlinear Leg Damping Model for the Prediction of Running Forces and Stability
Journal of Computational and Nonlinear Dynamics
·
02 Apr 2015
·
doi:10.1115/1.4028751